PID là một thuật toán quan trọng trong lĩnh vực điều khiển máy móc, giúp hệ thống có khả năng điều chỉnh giá trị sai lệch. Vậy ý nghĩa của PID là gì và cách hiệu chỉnh các thông số PID như thế nào? Trong bài viết này HG Automation sẽ cung cấp cho bạn toàn bộ kiến thức liên quan đến PID một cách đầy đủ và chi tiết.
Nội dung
PID là gì?
PID được viết tắt từ cụm từ Proportional Integral Derivative, đại diện cho một cơ chế phản hồi trong hệ thống điều khiển, được áp dụng rộng rãi trong các hệ thống điều khiển công nghiệp hiện đại.
Tìm hiểu khái niệm PID là gì?
Bộ điều khiển PID đóng vai trò quan trọng trong việc tính toán giá trị sai số cho các máy tính công nghệ. Sai số được xác định bằng sự khác biệt giữa giá trị đo đạc của thông số và giá trị mục tiêu do người thiết kế hoặc người dùng đặt ra. Bằng cách điều chỉnh giá trị đầu vào điều khiển, bộ điều khiển PID giúp giảm thiểu sai số và đảm bảo hoạt động chính xác và hiệu quả hơn.
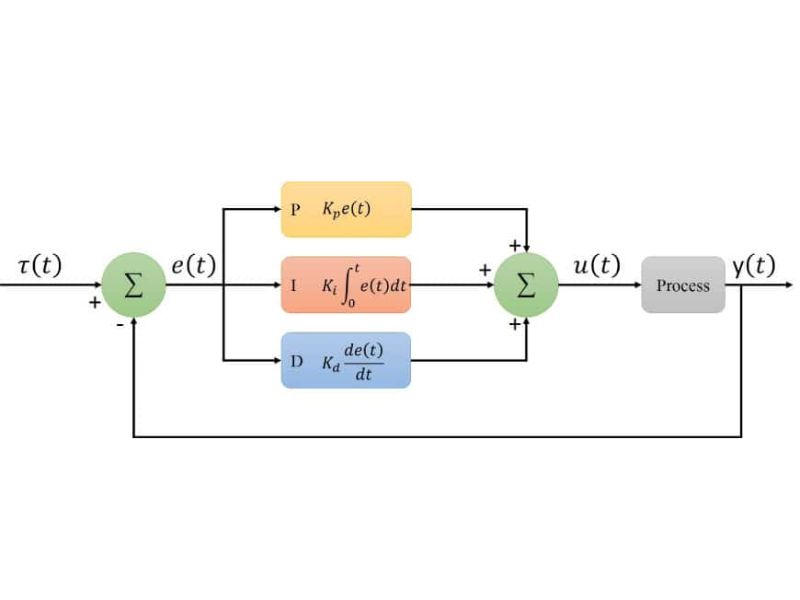
- Phương pháp P (Proportional): Tạo ra tín hiệu điều chỉnh tỉ lệ với sai số đầu vào theo thời gian lấy mẫu.
- Phương pháp I (Integral): Tích phân sai số theo thời gian lấy mẫu. Điều khiển tích phân giúp giảm thiểu sai số tức thời và tích lũy trong quá khứ. Độ lớn của tác động điều chỉnh tích phân phụ thuộc vào thời gian lấy mẫu, với thời gian càng nhỏ thì tác động tích phân càng mạnh và sai số càng nhỏ.
- Phương pháp D (Derivative): Vi phân sai số. Điều khiển vi phân tạo ra tín hiệu điều chỉnh tỉ lệ với tốc độ thay đổi của sai số đầu vào. Phạm vi điều chỉnh vi phân phụ thuộc vào thời gian, với thời gian càng lớn thì tác động vi phân càng mạnh và bộ điều khiển phản ứng nhanh hơn với thay đổi đầu vào.
Các loại bộ điều khiển PID
Bộ điều khiển PID trong lĩnh vực này có thể được phân loại thành các dạng sau:
- PI, viết tắt của Proportional and Integral Controller, là một bộ điều khiển tỉ lệ và tích phân.
- P đại diện cho Proportional Controller, một bộ điều khiển tỉ lệ.
- PID là viết tắt của Proportional, Integral và Derivative (PID) Controller, tức là bộ điều khiển tỉ lệ, tích phân và đạo hàm.
- PD thể hiện Proportional and Derivative Controller, một bộ điều khiển tỉ lệ và đạo hàm.
>>> Tham khảo ngay: Quy trình điều khiển DDC hoạt động như thế nào?
Nguyên tắc hoạt động của bộ điều khiển PID
Trong lĩnh vực điều khiển, hệ thống bao gồm nhiều thiết bị quan trọng như:
- Cơ cấu chấp hành, gồm các thiết bị gia nhiệt.
- Thiết bị điều khiển như HMI (Human Machine Interface) hoặc PLC (Programmable Logic Controller).
- Thiết bị phản hồi, bao gồm cảm biến áp suất, nhiệt độ, v.v.
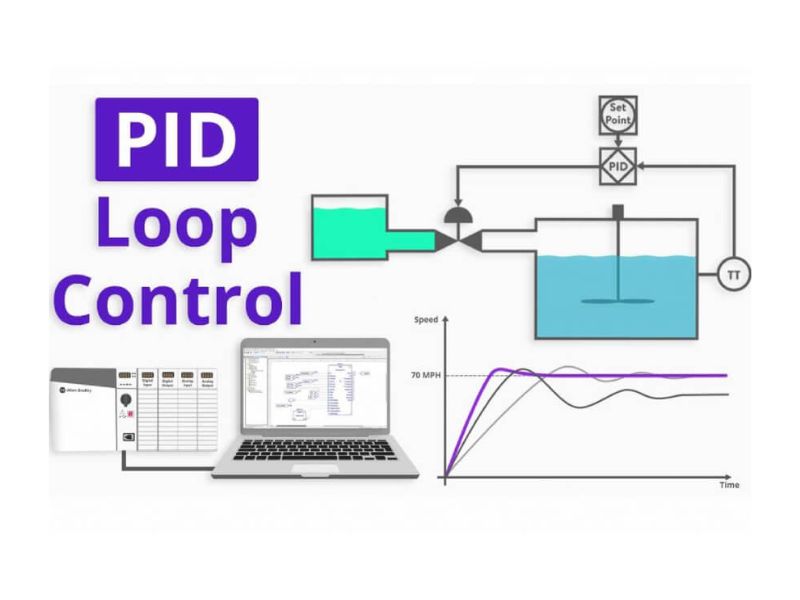
Sau khi thiết lập giá trị set point (SV) hay giá trị cài đặt, bộ điều khiển sẽ gửi thông tin điều khiển đến từng thiết bị chấp hành và cơ cấu. Trong quá trình này, các thuật toán sẽ thực hiện việc mở và đóng liên tục với thời gian phản hồi nhanh hoặc chậm, tuỳ thuộc vào hệ thống đang hoạt động.
Ví dụ: Trong một biểu đồ điều khiển nhiệt độ, giá trị luôn được duy trì ở mức 200 độ F. Chế độ bật/tắt sẽ liên tục mở và đóng khi nhiệt độ lần lượt đạt 202 độ F và 198 độ F. Điều này nhằm đảm bảo rằng nhiệt độ 200 độ F luôn được duy trì theo giá trị cài đặt.
Nguyên tắc hoạt động của bộ điều khiển PID
>>> Xem thêm: Cách thức hoạt động của Encoder là gì? Một số ứng dụng của Encoder
Ứng dụng của PID (Proportional Integral Derivative) trong cuộc sống
Hiện nay, việc áp dụng Proportional Integral Derivative (PID) trong công nghiệp đã trở nên rất phổ biến, và chúng được sử dụng trong các quá trình sản xuất, gia công, chế biến và nhiều ngành, lĩnh vực khác nhau.
Bộ điều khiển PID giúp giảm sai số trong các biến động và thời gian ổn định, cũng như cải thiện độ nhạy và linh hoạt một cách hiệu quả. Do đó, PID có rất nhiều ứng dụng, bao gồm:
- Điều khiển biến tần: PID được sử dụng trong các thiết bị điện, điện tử để tạo ra hệ thống điều khiển biến tần. Ngoài ra,các biến tần trên thị trường ngày nay đều hỗ trợ chế độ điều khiển PID. Thuật toán PID sẽ điều khiển ngõ ra của biến tần để đạt tín hiệu phản hồi ổn định nhất theo thời gian so với giá trị cài đặt. Một số biến tần đời cũ có thể có ít thông số PID hơn so với các biến tần hiện đại ngày nay. Nếu bạn đang cần tìm loại biến tần nào chất lượng hãy tham khảo dòng biến tần Danfoss, Vanco của HG Automation.
- Điều khiển mức nước: PID được áp dụng để tự động hóa các thiết bị điện, điện tử, cảm biến và van nhạy, từ đó nâng cao năng suất.
- Sử dụng trong hệ thống PLC: Với PID, người dùng có thể thiết kế các chức năng sẵn có để điều chỉnh nhiệt độ, áp suất, lưu lượng, v.v.
- Kiểm soát lưu lượng nước thông qua cảm biến đường ống: Điều này là một ưu điểm vượt trội của PID trong việc điều khiển lưu lượng nước.
Bộ điều khiển PID đóng vai trò cực kỳ quan trọng trong cuộc sống hiện đại. Chúng được ứng dụng rộng rãi trong các hoạt động hàng ngày của con người.

Ứng dụng của PID (Proportional Integral Derivative) trong cuộc sống
>>> Tham khảo ngay: Nguyên lý hoạt động của Contactor và các loại Contactor phổ biến trên thị trường
Cách điều chỉnh thông số với bộ điều khiển PID
Để điều chỉnh bộ điều khiển PID không phải là một công việc đơn giản, ngay cả khi bạn đã nắm vững ba thông số cơ bản thì việc điều chỉnh này có thể gặp khó khăn. Dưới đây là một số phương pháp hữu ích bạn có thể tham khảo:
- Tối ưu hóa hành vi: Điều chỉnh các quá trình hoặc điểm cài đặt của bộ điều khiển PID. Bằng cách này, bạn có thể tự điều chỉnh sai số và đạt được sự ổn định. Tuy nhiên, điều này phụ thuộc vào nhiều tiêu chuẩn khác nhau như thời gian xác lập và thời gian khởi động máy. Lưu ý rằng cần tối ưu hóa việc sử dụng năng lượng để đạt hiệu suất tối đa.
- Đảm bảo độ ổn định: Độ trễ lớn sẽ gây ra sự bất ổn định. Để đạt được độ ổn định cao, bạn cần đảm bảo không có sự dao động xảy ra trong quá trình điều khiển.
>>> Tham khảo ngay: Các loại MCCB và ý nghĩa của thông số trên MCCB
Các khâu hiệu chỉnh của bộ điều khiển PID
PID gồm có các khâu hiệu chỉnh nào? HG Automation sẽ giúp bạn giải đáp chi tiết ngay dưới đây:
Khâu tỉ lệ (Kp)
Để đáp ứng yêu cầu về tỷ lệ, người dùng có thể điều chỉnh tỷ lệ thông qua việc tính toán và áp dụng hệ số tỉ lệ (Kp). Khâu điều chỉnh tỉ lệ sẽ được thực hiện theo công thức sau:
P(out) = Kp * e
Trong đó:
- P(out): thừa số tỉ lệ đầu ra.
- e: sai số, được tính bằng hiệu của giá trị đặt (SP) và giá trị đo (PV).
- Kp: hệ số tỉ lệ, còn được gọi là thông số điều chỉnh.
- t: thời gian/khoảng thời gian tức thời.
Khâu tích phân (Ki)
Khâu này có mối liên hệ tỷ lệ thuận với biên độ và thời gian của sai số. Nó cho phép chúng ta nhìn thấy sự tích lũy và điều chỉnh những phần đã được điều chỉnh trước đó.
Trong đó:
- e: biểu thị cho sai số.
- I (out): thừa số tích phân đầu ra.
- t: thời gian/thời gian tức thời.
- Ki: độ lợi tích phân, cũng là thông số điều chỉnh.
>>> Tham khảo ngay: Nguyên lý hoạt động và cấu tạo của biến tần
Khâu đạo hàm (Kd)
Để xác định tốc độ của sai số trong quá trình điều khiển, chúng ta cần đo đạc độ thay đổi của sai số theo thời gian. Công thức dưới đây có thể được áp dụng để tính toán:
Trong đó:
- D (out): thừa số vi phân của đầu ra.
- e: sai số.
- Kd: độ lợi vi phân, là một thông số điều chỉnh.
- t: thời gian/thời gian tức thời.
Mong rằng thông tin mà chúng tôi đưa ra đã giúp quý khách hiểu rõ hơn về khái niệm Bộ điều khiển PID là gì. Nếu quý khách đang quan tâm đến sản phẩm này hoặc cần tư vấn miễn phí về các giải pháp tự động hóa, hãy liên hệ ngay với HG Automation qua HOTLINE 0979402466.
Bài viết liên quan:
- Phương pháp quản lý spare parts phổ biến hiện nay


